
尾形研究室の技術について公開します.
EIPL (Embodied Intelligence with Deep Predictive Learning)
![]()
尾形研究室がムーンショットプロジェクトにて開発した、深層予測学習のオープンソースソフトウェアです.
リンク
SCTRNN
尾形研究室で開発に取り組んでいる分散を予測するニューラルネットワークのソースコードです.
ソースコード
TwitterRTC
TwitterとRTミドルウェア間の連携のためのRTC
くわしくはこちら
OpenRTM-aistを使った深層学習器とロボティクスを同時に学ぶことのできる教材
2018年RTミドルウェアコンテスト作品
くわしくはこちら
レコードスケッチ
描画行為と音楽再生をミクスチャーした作品です.
レコードスケッチについて,より詳しく知りたい方はこちらへ
RTM Box Coding
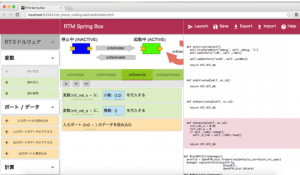 ロボットミドルウェアの初学者向けのWebベースのビジュアルプログラミングツールです.
ロボットミドルウェアの初学者向けのWebベースのビジュアルプログラミングツールです.
マニピュレーション用RTコンポーネント群
 ロボットアームのマニピュレーションに関わるコンポーネント群です.
ロボットアームのマニピュレーションに関わるコンポーネント群です.
ドキュメント
ナビゲーション用RTコンポーネント群
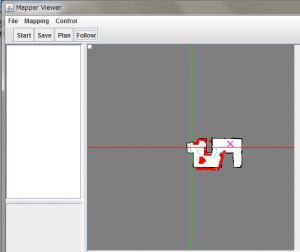 移動ロボットのナビゲーションに関わるコンポーネント群です.
移動ロボットのナビゲーションに関わるコンポーネント群です.
ドキュメント
NAO RTC
 Aldebaran Robotics社のNAOに対応したRTコンポーネントを提供しています.
Aldebaran Robotics社のNAOに対応したRTコンポーネントを提供しています.
ドキュメント
ソースコード
UnityでのOpenRTM-aistの利用
ゲーム開発エンジンのUnityからロボットやロボット技術デバイスにアクセスするためのインターフェースとしてRTCそ使えます.C#との連携ツールをUnityに流用することで実現します.
ドキュメント
MAX/MSPとRTCのブリッジ
 マルチメディア用統合開発環境「MAX」とRTCを繋ぐブリッジツールです.
マルチメディア用統合開発環境「MAX」とRTCを繋ぐブリッジツールです.
ドキュメント
ソースコード
動力学シミュレータ”CoppeliaSim (旧V-REP)”用,OpenRTM-aist対応化プラグイン
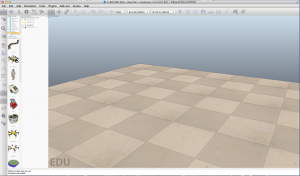 CoppeliaSim(旧V-REP)に組み込むことで,シミュレーション内のロボットにRTCのインターフェースで入出力ができるプラグインを開発しています.これにより,Luaスクリプトでシミュレーションを組むよりも,より再利用性が高いシミュレーションが可能です.
CoppeliaSim(旧V-REP)に組み込むことで,シミュレーション内のロボットにRTCのインターフェースで入出力ができるプラグインを開発しています.これにより,Luaスクリプトでシミュレーションを組むよりも,より再利用性が高いシミュレーションが可能です.
ドキュメント
ソースコード
バイナリ
Actroid RTC
 株式会社ココロ製ロボット「Actroid」を使うためのRTコンポーネントです.
株式会社ココロ製ロボット「Actroid」を使うためのRTコンポーネントです.
ソースコード
WACOM社製タブレット対応RTC
WACOM社製タブレットの情報収集用のRTコンポーネントです.
ドキュメント
ソースコード
公開3Dモデル
Kobuki用LRFアタッチメント
北陽電機社製のレーザーレンジファインダURG-04LX-UG01を,Yujin Robot社の移動台車ロボットKobukiに取り付けるためのアタッチメントです.