
概要
学習ベースト制御器とモデルベースト制御器を組み合わせた,ロボットタスクにおける未定義動作の補償手法の研究を行っている.タスク動作を学習したRecurrent Neural Network (RNN)の内部表現に基づいて未定義動作の判定を行うことで,メインタスクの性能を保ったまま,タスク動作中のエラーリカバリーが可能となる.
研究背景
ロボットアプリケーションには,高いタスクパフォーマンスと未定義動作の補償の両方が必要とされる.深層学習はセンサ情報からEnd-to-Endに動作軌道を生成可能な一方[1],訓練データの軌道に全くない領域の予測は非常に困難である.本研究では深層学習の汎化能力を超えた範囲のロボット動作を「未定義動作」と呼び,ロボットタスク中の未定義動作の対処について検討した.
未定義動作の補償が必要な例として,人間-ロボットの共同作業中のエラーリカバリーが挙げられる.ロボットは衝突等により未定義動作をとる場合があり,ロボットが協働作業者や作業環境に損害を与えたりしないようにするには,制御器が適切な姿勢を提供し,メインタスクを再開する必要がある.
提案手法
本研究では,ロボットが未定義動作をとる際にモデルベースト制御器に切り替えることで,学習ベースト制御器の予期しない出力を補償する手法を提案している.エラーリカバリーのために複数の制御器を適切に切り替えるには,タスク実行中に未定義動作を特定する必要がある.ただし,学習ベースト制御器のタスク予測性能と未定義動作の検出性能が異なると,タスクパフォーマンスが低下する可能性がある.例えば,タスク遂行に必要な動作だが訓練データには含まれていない動作を未定義動作と判定してしまう,などである.これを防ぐためには2つの予測性能のバランスをとる必要がある.本研究では,学習ベースト制御器の予測性能(汎化性能)を評価することにより,未定義動作を検出する.
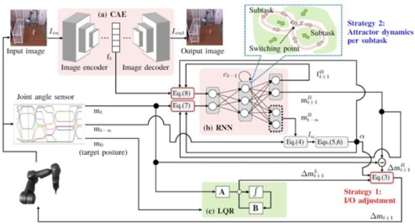
図は提案手法の概要を示している.メインタスクを学習する学習ベースト制御器としてRNN(図b)とAuto Encoder(図a)を,エラーリカバリー動作を行うモデルベースト制御器として線形二次レギュレータ(図c)を用いている.提案手法はRNNが予測する過去の動作軌道との比較に基づいて,現在の動作軌道が訓練された動作に属するかどうかを決定する.この際,過去の動作軌道はタスクを学習したRNNの内部表現を再利用して予測される.これは,RNNの内部状態にはタスク遂行に必要な直近の情報が埋め込まれているため,RNNが汎化可能な範囲ならば適切に予測が可能であるという仮説に基づいている.これにより,学習ベースト制御器はタスクパフォーマンスを維持しながら未定義動作の検出を行う.現在の動作軌道が未定義動作の場合,モデルベースト制御器に切り替えられる(図: Switching Strategy 1).
さらに,RNNに埋め込まれたサブタスクごとのアトラクタを利用した動作切り替え手法[2]も採用している(図: Switching Strategy 2).これは,モデルベースト制御器によるエラーリカバリー動作の後に,再度学習ベースト制御器に切り替える際に利用される.2つのスイッチング戦略を組み合わせることにより,個別の未定義動作検出器を設計することなく目的が達成される.実験では,実機タスクでの検証,及び,従来手法との比較を行い,提案手法の有効性を確認した.
今後の予定
今後の展望として,リカバリーする目標姿勢の多様化や,未定義動作の判定におけるセンサ情報から得られる特徴量の利用に向けた提案手法の拡張を行っていく.
発表
- Kanata Suzuki, Hiroki Mori, Tetsuya Ogata, “Compensation for undefined behaviors during robot task execution by switching controllers depending on embedded dynamics in RNN,” IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 3475-3482, 2021 (with ICRA’21 option).
- 鈴木彼方, 森裕紀, 尾形哲也, ”再帰神経回路モデルの過去時系列予測とモデルベースト制御による未定義動作保証,” 日本機械学会ロボティクス・メカトロニクス講演会 (ROBOMECH’20), オンライン, 2020年5月27日-30日.
参考文献
- Pin-Chu Yang, Kazuma Sasaki, Kanata Suzuki, Kei Kase, Shigeki Sugano, Tetsuya Ogata, “Repeatable Folding Task by Humanoid Robot Worker using Deep Learning,” IEEE Robotics and Automation Letters, vol. 2, no. 2, pp. 397-403, 2016 (with ICRA’17 option).
- Kanata Suzuki, Hiroki Mori, Tetsuya Ogata, “Motion Switching with Sensory and Instruction Signals by designing Dynamical Systems using Deep Neural Network,” IEEE Robotics and Automation Letters, vol. 3, issue. 4, pp. 3481-3488, 2018.