
概要
ロボットは様々なメカトロニクスモジュールや,知能化ソフトウエアの集合体です.そのようなモジュールの再利用性を向上させるためのツールとして,RTミドルウエア (Robotic Technology Middleware) に着目しています.RTミドルウエアは,ロボット技術要素(アクチュエータ,センサー,制御ソフトウエア)をRTコンポーネントという機能単位に分割して相互に通信・実行可能なミドルウエアです.我々はこの技術を表現工学的な創作活動への応用を目指し,創作活動を行いながら,下記のような課題に対して挑戦をしています.
- RTミドルウエアの利用を促進するためのツールの設計・開発・評価
- RTミドルウエアの使用法を教育するための教材開発
- 技術的知識の低いユーザでも再利用可能なコンポーネントの設計法の抽出,またそのようなRTCの収集
 ロボットのシステム設計に関して議論し,課題抽出をし,開発サポート用ツールの開発や,設計論の構築,サービスロボットのプロトタイピングに役立つフレームワークの構築などを行っています. |
 システム設計や,ロボット用ミドルウェアを習得するために,学内で勉強会や,学外での講習会などに参加します.学外の研究者や学生との交流もたくさんあります. |
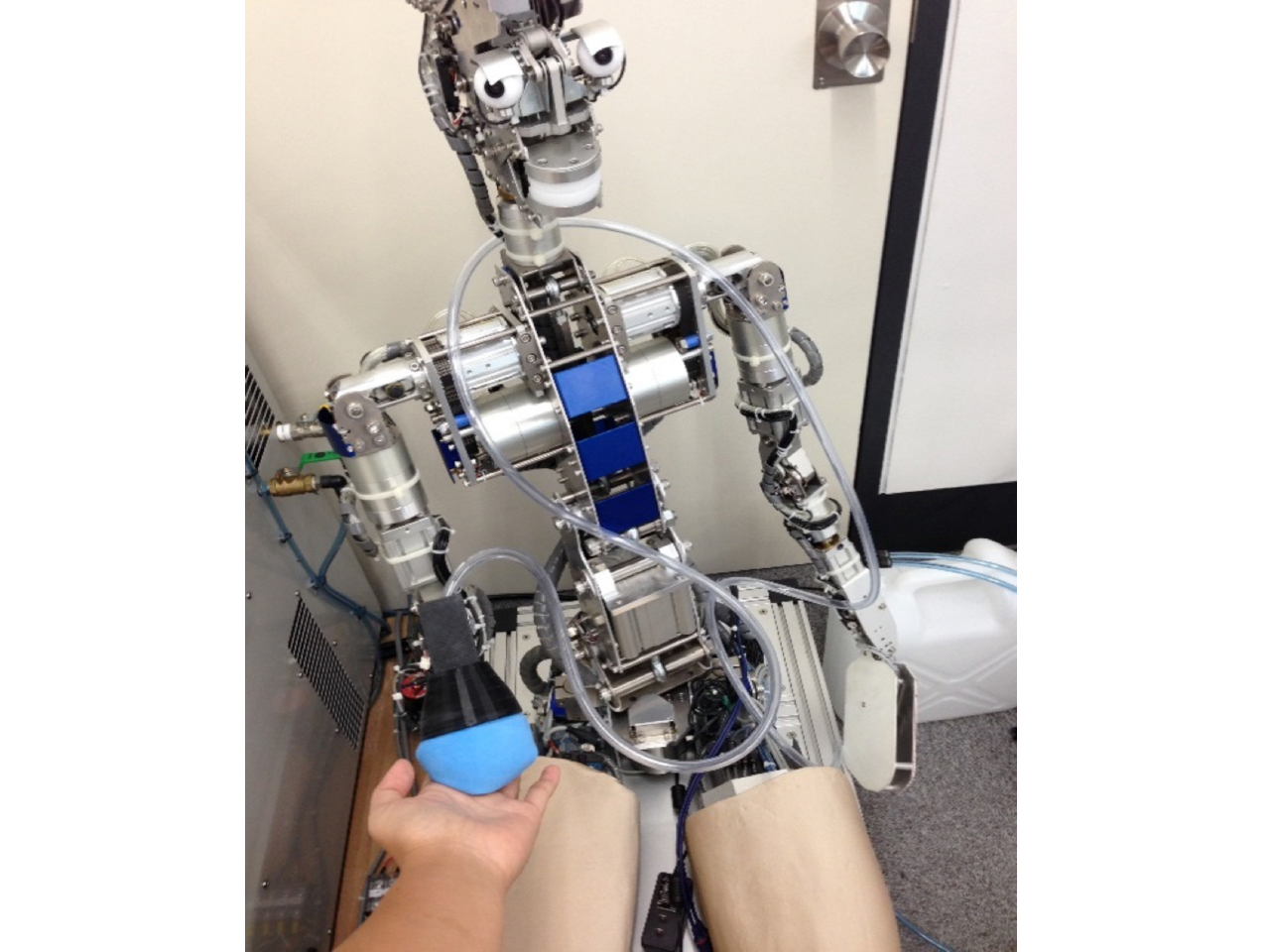
 様々なロボットに適用可能な知能化ツールの開発が目的ですので,いろんなロボットを動かします. |
 ちょっとした装置ならば自作します.Arduinoで組み込み開発をして,ロボットシステムに組み込みます |
 3次元CADで設計をし,3Dプリンタでロボットハンドを自作しました.ユニバーサルジャミンググリッパーです. |
 ロボットを動かすためのインターフェース開発も行います. |
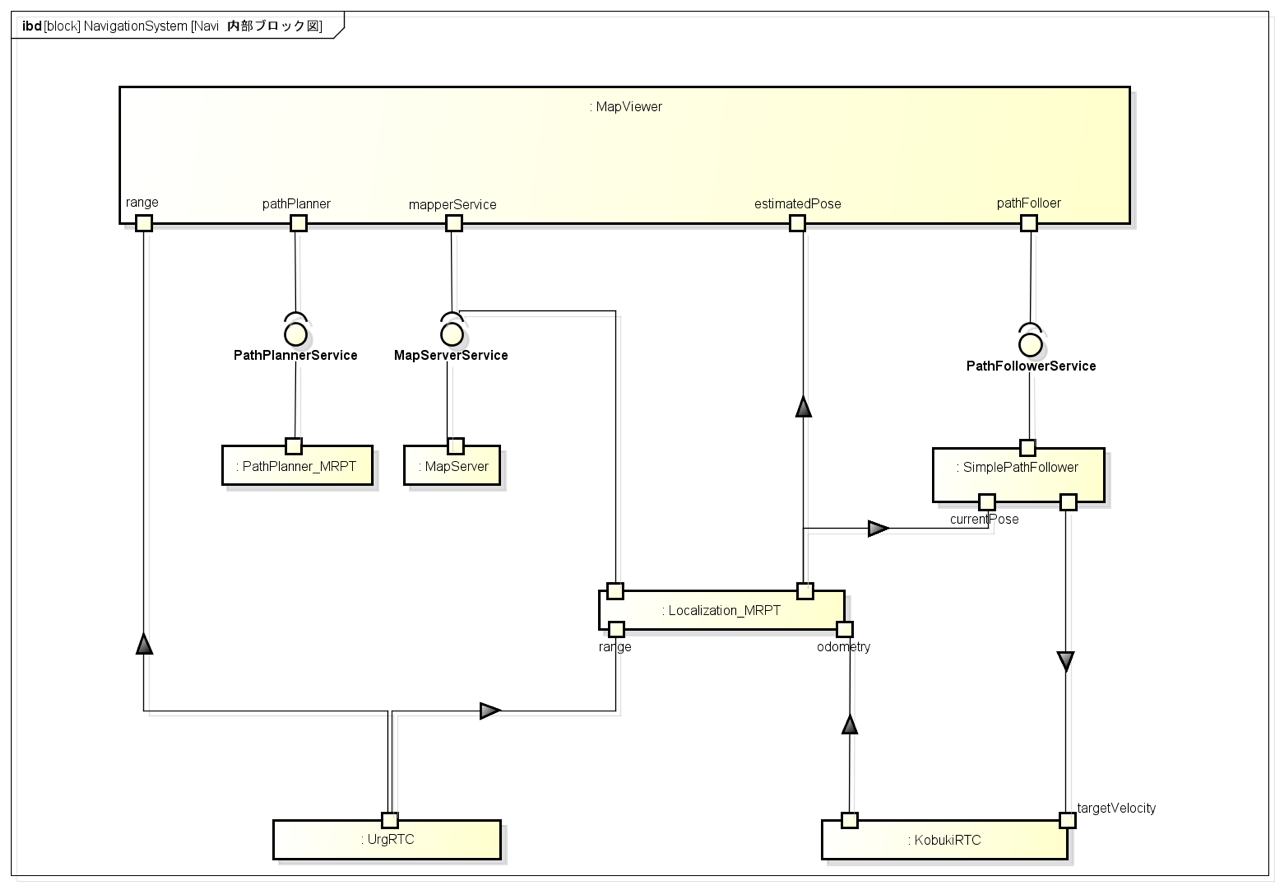
移動ロボットのナビゲーション用フレームワーク
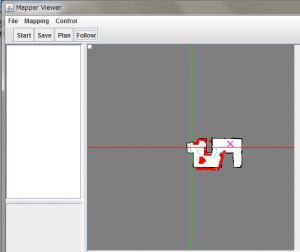 移動ロボットのナビゲーションに関わるコンポーネント群です.
移動ロボットのナビゲーションに関わるコンポーネント群です.
ドキュメント
グラフィカルな教育用RTミドルウェアプログラミング環境「RTM Box Coding」
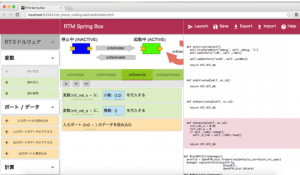 ロボットミドルウェアの初学者向けのWebベースのビジュアルプログラミングツールです.
ロボットミドルウェアの初学者向けのWebベースのビジュアルプログラミングツールです.
マニュピレーション用フレームワーク
 ロボットアームのマニピュレーションに関わるコンポーネント群です.
ロボットアームのマニピュレーションに関わるコンポーネント群です.
ドキュメント